RoboCup is an international annual event designed to showcase advances in the fields of robotics and artificial intelligence (AI). At this event, different teams of humanoid robots play soccer against each other,

RoboCup is an international annual event designed to showcase advances in the fields of robotics and artificial intelligence (AI). At this event, different teams of humanoid robots play soccer against each other,

Modular robots—robotic systems that can adapt their body configuration to change locomotion style or move on different terrains—can be highly advantageous for tackling missions in diverse environments. Over the past decade or so, engineers have developed a wide range...
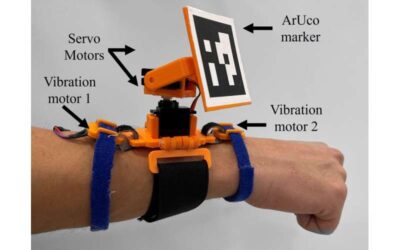
Motion capture (mocap) systems, technologies that can detect and record the movements of humans, animals and objects, are widely used in various settings. For instance, they have been used to shoot movies, to create animations with realistic lip and body movements, in...

Over the past decade, robotic systems have revolutionized numerous sectors, including the agricultural and farming sector. Many tasks that were traditionally performed manually can now be potentially automated, boosting efficiency and reducing the workload of farmers...
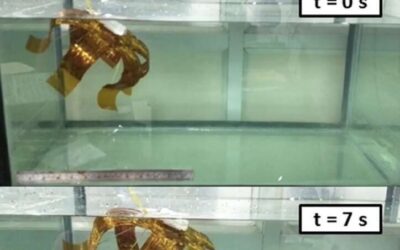
In recent decades, roboticists have been developing increasingly sophisticated robots inspired by nature and living organisms. By realistically emulating biological processes and animal behaviors, these robots can often navigate different environments and tackle...
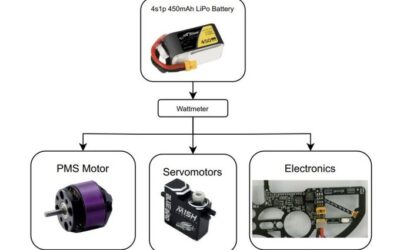
Unmanned aerial vehicles (UAVs), commonly known as drones, have already proved to be highly promising for tackling numerous real-world problems, for instance allowing users to take aerial images, monitor remote or natural environments, deliver parcels, or assisting...
Research in the field of robotics has been booming over the past decade with a view to tackle challenges of real value to industry and the public domain. With new robotic systems appearing every other day, developing reliable tools that can be used to evaluate their...
AI-powered robots have become increasingly sophisticated and are gradually being introduced in a wide range of real-world settings, including malls, airports, hospitals and other public spaces. In the future, these robots could also assist humans with house chores,...

In recent years, roboticists have created a growing number of autonomous systems based on different structures and designs. Among these are modular robots, which are composed of different elements or "modules" that can be reconfigured to carry out specific tasks more...

Different people tend to have unique needs and preferences—particularly when it comes to cleaning or tidying up. Home robots, especially robots designed to help humans with house chores, should ideally be able to complete tasks in ways that account for these...