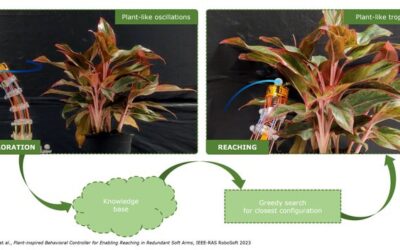
Many existing robotics systems draw inspiration from nature, artificially reproducing biological processes, natural structures or animal behaviors to achieve specific goals. This is because animals and plants are innately equipped with abilities that help them to...