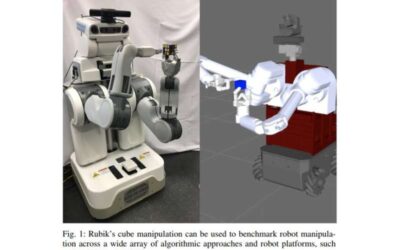
Researchers at University of Washington have recently developed a new protocol to train robots and test their performance on tasks that involve object manipulation. This protocol, presented in a paper published in IEEE Robotics and Automation Letters, is based on...