In recent years, scientists have introduced a wide variety of robots of all shapes and sizes. Among these are microswimmers, carefully engineered microstructures that can move in water and other liquids.
In recent years, scientists have introduced a wide variety of robots of all shapes and sizes. Among these are microswimmers, carefully engineered microstructures that can move in water and other liquids.

Over the past few decades, roboticists and computer scientists have developed increasingly advanced systems that can interact with humans and complete numerous everyday tasks. While robots are rapidly advancing, for humans to effectively start using them they should...
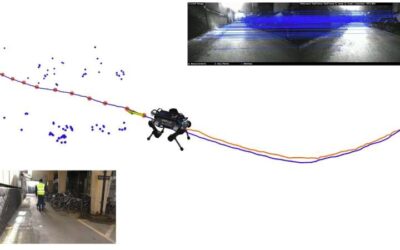
To operate autonomously in a various unfamiliar settings and successfully complete missions, mobile robots should be able to adapt to changes in their surroundings. Visual teach and repeat (VT&R) systems are a promising class of approaches for training robots to...
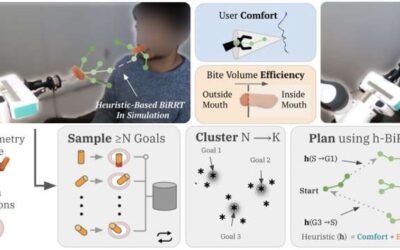
Robots could be invaluable allies for older adults and people with physical disabilities, as they could assist them in their day-to-day life and reduce their reliance on human carers. A type of robotic systems that could be particularly helpful are assisted feeding or...
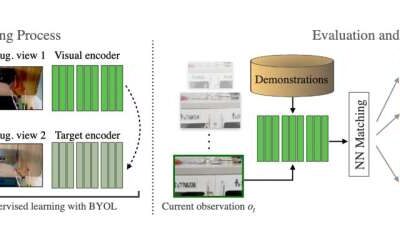
Over the past few decades, computer scientists have been trying to train robots to tackle a variety of tasks, including house chores and manufacturing processes. One of the most renowned strategies used to train robots on manual tasks is imitation learning.
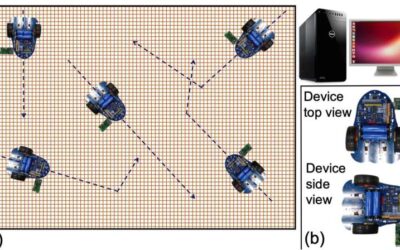
Researchers at the Indian Institute of Technology Bhubaneswar, in collaboration with TCS Research and Wageningen University, recently devised a new strategy that could improve coordination among different robots tackling complex missions as a team. This strategy,...

Researchers at the Italian Institute of Technology (IIT) have recently been exploring a fascinating idea, that of creating humanoid robots that can fly. To efficiently control the movements of flying robots, objects or vehicles, however, researchers require...
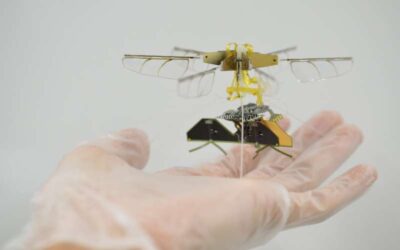
Micro-sized robots could have countless valuable applications, for instance, assisting humans during search-and-rescue missions, conducting precise surgical procedures, and agricultural interventions. Researchers at Massachusetts Institute of Technology (MIT) have...
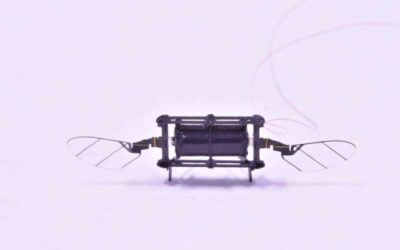
Researchers at Toyota Central R&D Labs have recently created an insect-scale aerial robot with flapping wings, powered using wireless radiofrequency technology. This robot, presented in a paper published in Nature Electronics, is based on a radiofrequency...

As robots become increasingly advanced, they are being trained to complete a wide variety of tasks. Some roboticists have been specifically exploring the potential of robotic systems that can assembly items without much human supervision, as this could significantly...