Over the next few decades, robots could be introduced into human environments, including homes, offices and retail spaces. Among other things, robotic systems could be used to tidy up spaces and make them safer for humans.
Over the next few decades, robots could be introduced into human environments, including homes, offices and retail spaces. Among other things, robotic systems could be used to tidy up spaces and make them safer for humans.
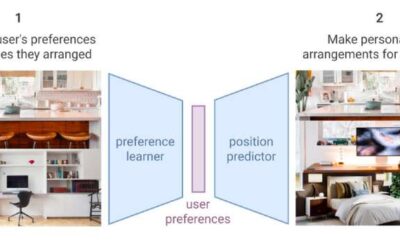
As robots become increasingly advanced and affordable, more people could start introducing them into their homes. Many roboticists have thus been trying to develop systems that can effectively assist humans with house chores, such as cooking, cleaning and tidying up.
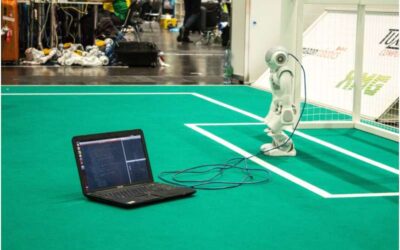
RoboCup, originally named the J-League, is an annual robotics and artificial intelligence (AI) competition organized by the International RoboCup Federation. During RoboCup, robots compete with other robots soccer tournaments.
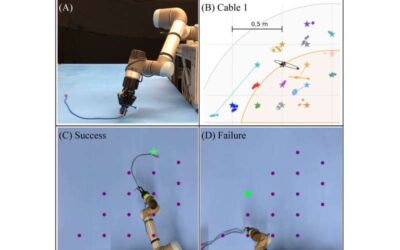
Magnetic soft robots are systems that can change shape or perform different actions when a magnetic field is applied to them. These robots have numerous advantageous characteristics, including a wireless drive, high flexibility and infinite endurance.

As robots are introduced in an increasing number of real-world settings, it is important for them to be able to effectively cooperate with human users. In addition to communicating with humans and assisting them in everyday tasks, it might thus be useful for robots to...

For people with motor impairments or physical disabilities, completing daily tasks and house chores can be incredibly challenging. Recent advancements in robotics, such as brain-controlled robotic limbs, have the potential to significantly improve their quality of life.
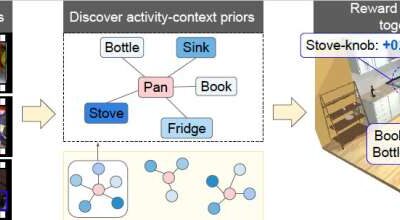
Over the past decade or so, many roboticists and computer scientists have been trying to develop robots that can complete tasks in spaces populated by humans; for instance, helping users to cook, clean and tidy up. To tackle household chores and other manual tasks,...

Legged robots have numerous advantageous qualities, including the ability to travel long distances and navigate a wide range of land-based environments. So far, however, legged robots have been primarily trained to move in specific environments, rather than to adapt...
The number of collaborative mobile robots introduced in real-world settings is gradually increasing, with approximately 20,000 new installations per year. For their use to increase further, however, roboticists should ensure that these robots are both efficient and...
As robots become increasingly sophisticated and advanced, they will typically require a growing amount of hardware components, including robotic limbs, motors, sensors and actuators. In addition, robots have integrated computers that process data collected by their...