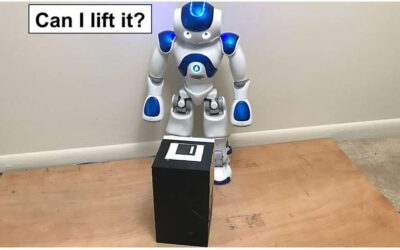
Humanoid robots, those with bodies that resemble humans, could soon help people to complete a wide variety of tasks. Many of the tasks that these robots are designed to complete involve picking up objects of different shapes, weights and sizes.
Humanoid robots, those with bodies that resemble humans, could soon help people to complete a wide variety of tasks. Many of the tasks that these robots are designed to complete involve picking up objects of different shapes, weights and sizes.

A supernova, the explosion of a white-dwarf or massive star, can create as much light as billions of normal stars. This transient astronomical phenomenon can occur at any point after a star has reached its final evolutionary stages.
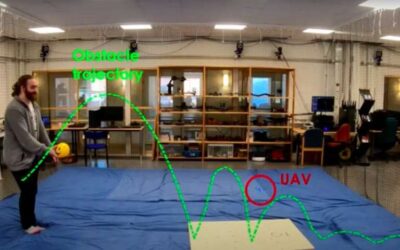
Autonomous unmanned aerial vehicles (UAVs) have shown great potential for a wide range of applications, including automated package delivery and the monitoring of large geographical areas. To complete missions in real-world environments, however, UAVs need to be able...

Humans are innately capable of performing complex movements with their hands via the articulation of their endoskeletal structure. These movements are made possible by ligaments and tendons that are elastically connected to a fairly rigid bone structure.
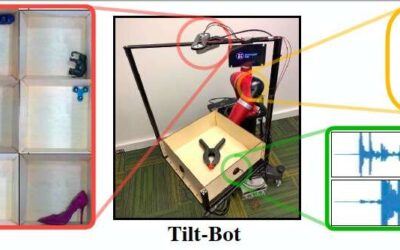
In recent years, researchers have developed a growing amount of computational techniques to enable human-like capabilities in robots. Most techniques developed so far, however, merely focus on artificially reproducing the senses of vision and touch, disregarding other...
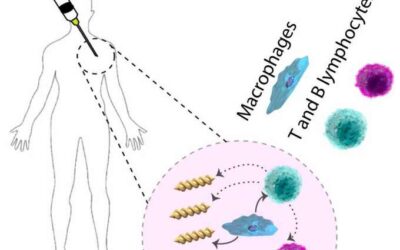
Over the past few years, robotics researchers have designed tiny and untethered swimming robots, also known as microswimmers, with increasingly advanced sensing and locomotion capabilities. These microrobots could prove very useful in medical settings, particularly...

Researchers at Charles University, Švanda Theater and the Academy of Performing Arts in Prague are currently working on an intriguing research project that merges artificial intelligence and robotics with theatre. Their project's main objective is to use artificial...

Vector-borne diseases are illnesses that can be transmitted to humans by blood-feeding insects, such as mosquitoes, ticks and fleas. Mosquitoes are known to contribute to the spread of a number of vector-borne diseases, including malaria, dengue, yellow fever and Zika.
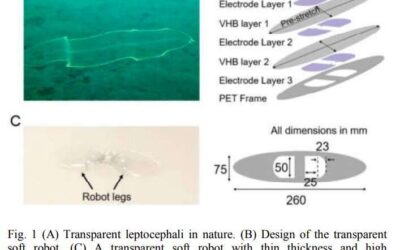
The ability to become transparent is a considerable evolutionary advantage, as it allows animals to blend in with their environment, avoid predators and mask their movements. Robots with similar capabilities could be of great value for a number of applications, for...
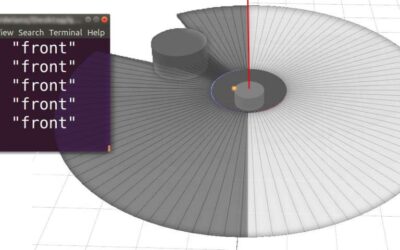
Over the past few years, researchers have been trying to apply quantum physics theory to a variety of fields, including robotics, biology and cognitive science. Computational techniques that draw inspiration from quantum systems, also known as quantum-like (QL)...