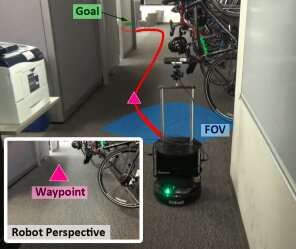
Researchers at UC Berkeley and Facebook AI Research have recently developed a new approach for robot navigation in unknown environments. Their approach, presented in a paper pre-published on arXiv, combines model-based control techniques with learning-based perception.