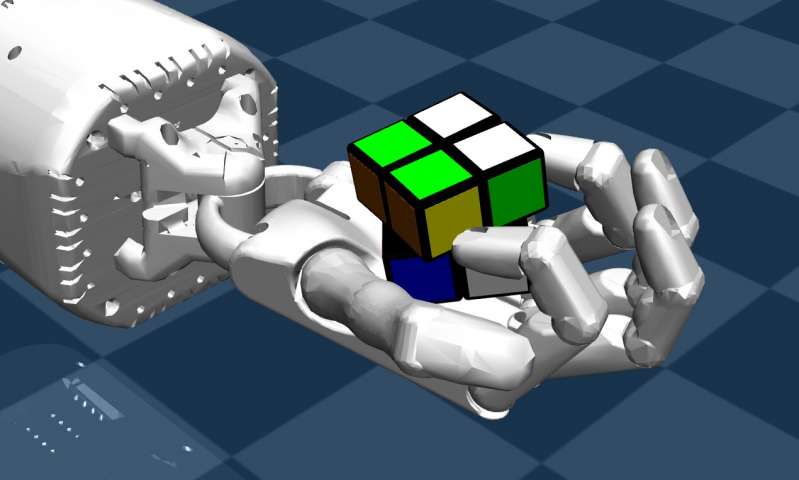
In recent years, a growing number of researchers have explored the use of robotic arms or dexterous hands to solve a variety of everyday tasks. While many of them have successfully tackled simple tasks, such as grasping or basic manipulation, complex tasks that...