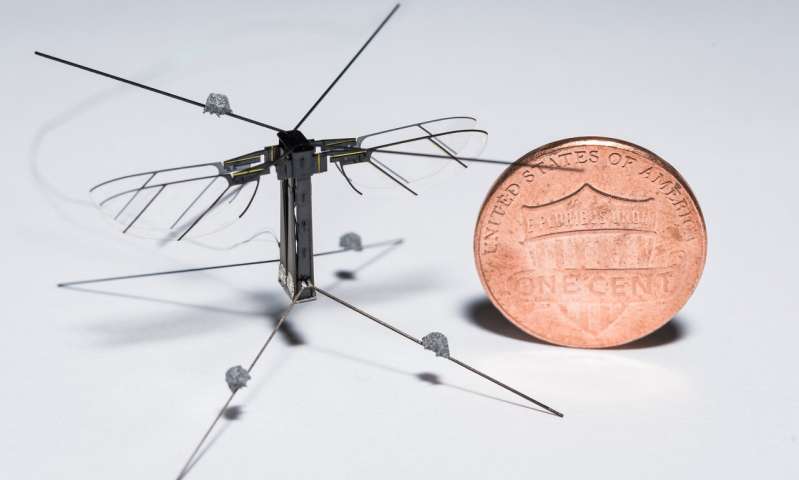
One of the key problems confronting researchers in the field of microrobotics is designing and implementing reliable controllers for insect-scale micro air vehicles (FWMAVs), which are tiny flying robots typically inspired by insects. In fact, although these...