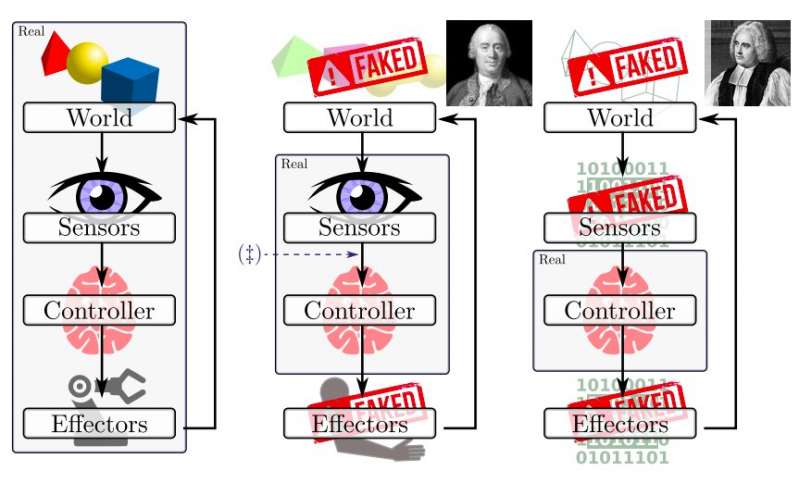
To evaluate the performance of robotics algorithms and controllers, researchers typically use software simulations or real physical robots. While these may appear as two distinct evaluation strategies, there is a whole other range of possibilities that combine...