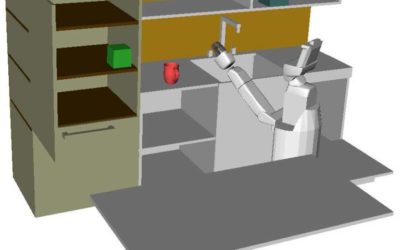
Researchers at MIT's Computer Science and Artificial Intelligence Laboratory have recently developed a chance-constrained motion planning system that can be applied to high degree-of-freedom (DOF) robots under motion uncertainty and in cases of imperfect state...