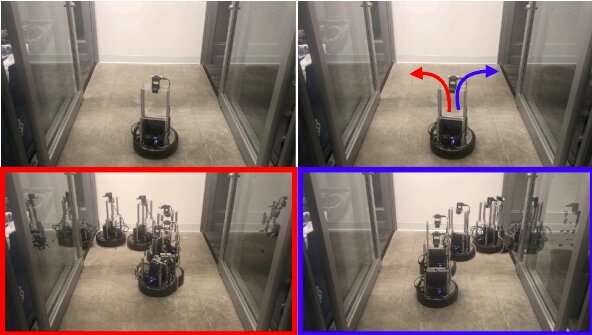
Researchers at UC Berkeley and Facebook AI Research have recently proposed a new approach that can enhance the navigation skills of machine learning models. Their method, presented in a paper pre-published on arXiv, allows models to acquire visuo-motor navigation...