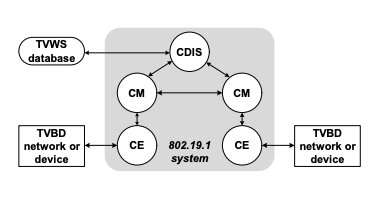
A team of researchers at Yale University, Virginia Tech, Temple University and Peking University has recently developed a new approach to enable the collaborative coexistence of cognitive radio (CR) networks over TV white space (TVWS). The term TVWS refers to unused...