AI or not AI: that is the question.

AI or not AI: that is the question.
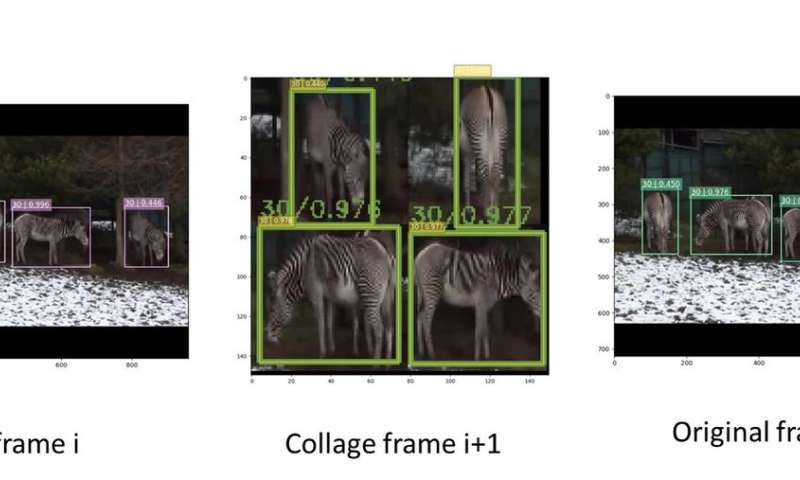
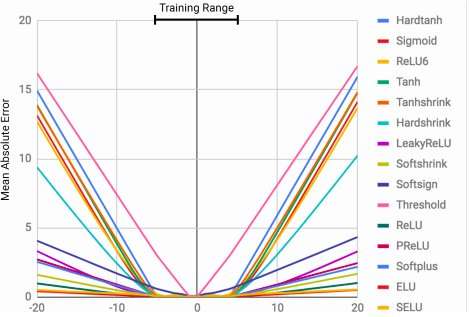
Researchers at the Robert Bosch Center for Data Science and Artificial Intelligence and Center for Computational Brain Research, Indian Institute of Technology Madras, and Purdue University have recently developed a new method of reducing computational requirements...
A team of researchers at Pyrofex Corporation recently introduced Casanova, a leaderless optimistic consensus algorithm suited for use in a blockchain. Rather than producing a chain, Casanova produces blocks in a directed acyclic graph (DAG), which is essentially a...

A team of researchers at Stanford University has recently developed a CNN classification method to colorize grayscale images. The tool they devised, called ColorUNet, draws inspiration from U-Net, a fully convolutional network for image segmentation.

Artificial intelligence can help us to better understand the causes of religious violence and to potentially control it, according to a new Oxford University collaboration. The study is one of the first to be published that uses psychologically realistic AI—as opposed...
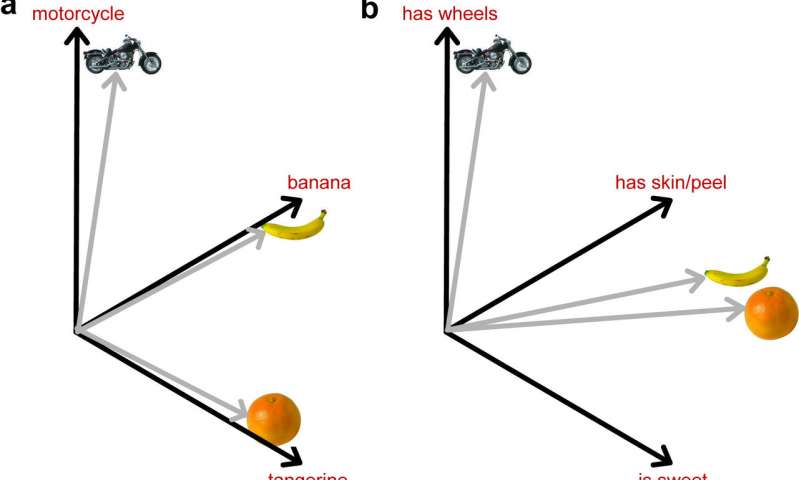
Neuroscience researchers at the University of Cambridge have combined computer vision with semantics, developing a new model that could help to better understand how objects are processed in the brain.

A team of researchers from R&D company Draper and Boston University developed a new large-scale vulnerability detection system using machine learning algorithms, which could help to discover software vulnerabilities faster and more efficiently.
Synthetic biology is a relatively new area of research that could significantly impact a number of fields, including biology, nanofabrication and medicine. A primary challenge in this emerging field is that of embedding computation in molecular contexts, in situations...
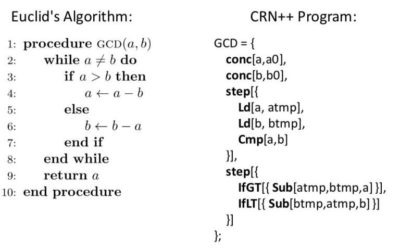
The ability to represent and manipulate numerical quantities can be observed in many species, including insects, mammals and humans. This suggests that basic quantitative reasoning is an important component of intelligence, which has several evolutionary advantages.
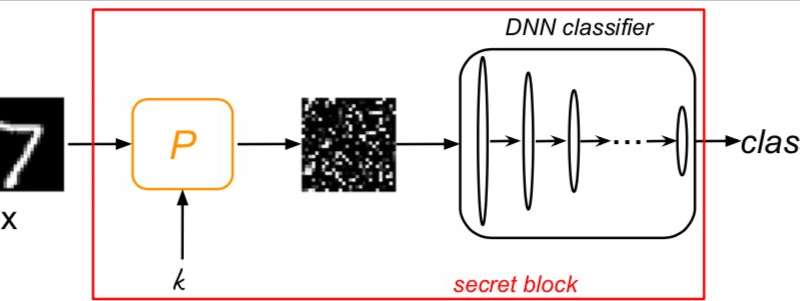
Researchers at the University of Geneva have recently developed a new defense mechanism that works by bridging machine learning with cryptography. The new system, outlined in a paper pre-published on arXiv, is based on Kerckhoffs' second cryptographic principle, which...