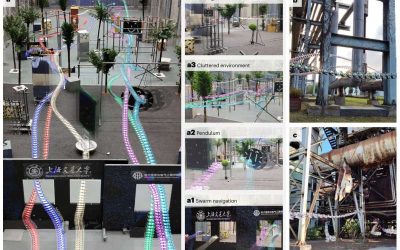
For robots to be successfully introduced in a wider range of real-world settings, they should be able to safely and reliably navigate rapidly changing environments. While roboticists and computer scientists have introduced a wide range of computational techniques for...